
Qualche giorno fa, ahimè, l’encoder rotativo del mio sistema di antenne mi ha lasciato e sono stato costretto ad un upgrade al Yaesu G1000DXC dato che il solo encoder assoluto IP67 o superiore costava oltre 400 euro. Questo modello è un rotore di tutto rispetto con la possibilità di interfacciarsi anche al PC per comandarlo direttamente dai vari software reperibili in rete…
Si, interfacciabile ma con un “piccolo” dettaglio, la board di collegamento al PC, chiamata GS-232B costa circa 500€, ovvero più del rotore stesso, ho allora deciso (come al solito) di andare di fai-da-te armandomi di saldatore e di un Arduino Nano.
Il lavoro sporco ovviamente è stato affidato ad un Arduino Nano con una manciata di componenti di contorno
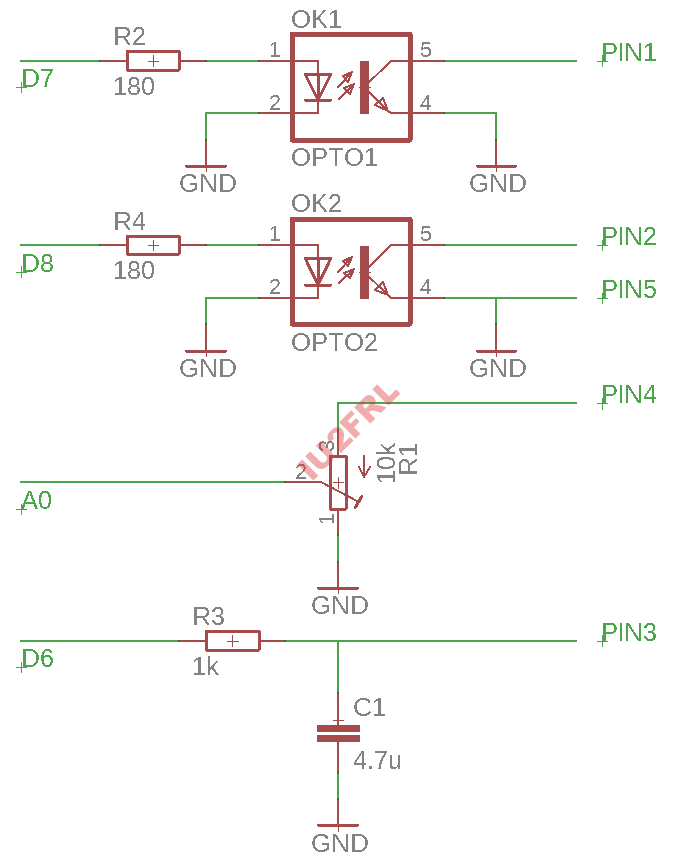
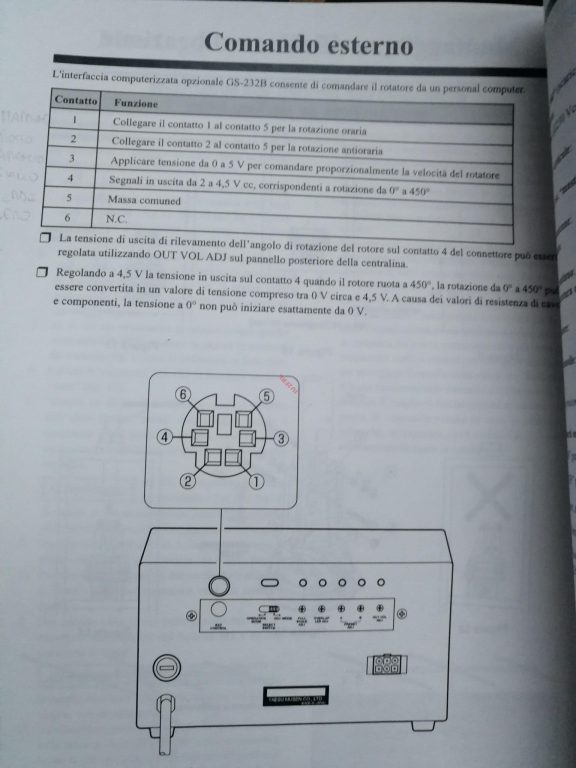
i pin sulla sinistra sono riferiti alla piedinatura di Arduino, quelli sulla destra sono quelli del connettore DIN. la massa è in comune tra Arduino ed il Control Box.

Il tutto è stato inscatolato lasciando a disposizione solo la presa USB di Arduino per la programmazione e l’interfacciamento e il cavetto con il connettore DIN.

il firmware usato è il classico di K3NG (progetto originale) abbondantemente alleggerito per farlo girare al meglio. Nelle mie prove ho usato un Arduino Nano V3 con un ATMega 168P ma le scarse dimensioni di memoria lo rendono instabile e a giorni passerò ad una versione con ATMega 328P più recente e con prestazioni migliori.
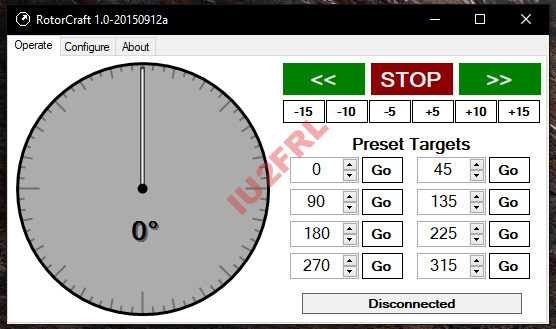
Il software che ho deciso di usare si chiama RotorCraft, è gratuito e leggerissimo e funziona bene.
La procedura di calibrazione è semplicissima, basta mettere l’antenna in una posizione nota e regolare il trimmer fino a visualizzare sul software la posizione corretta.
Link al firmware alleggerito: k3ng_rotator_controller_Nano168
Link al Firmware Collaudato su Arduino Nano 328P: k3ng_rotator_controller
La stessa identica procedura è attuabile su qualsiasi tipo di rotore, nel caso in cui non fosse presente una presa di interfaccia è sufficiente usare dei relè o dei FET collegati in parallelo ai pulsanti per il controllo manuale e prelevare il feedback di posizione dalla scheda al interno del Control Box, in caso di motori a corrente alternata fare particolare attenzione al segnale della posizione attuale in quanto potrebbe essere anche esso in alternata.
Post Disclaimer

Informazioni Importanti
Note generali: Le informazioni contenute in questo articolo sono di carattere informativo e rispecchiano le opinioni personali del autore. Tutte le guide nel sito vengono proposte "as it is" puramente a scopo didattico. L'utente che accetta di seguirne i passaggi si assume ogni responsabilità in caso di guasto/malfunzionamento o altro problema come conseguenza della modifica.
Link di affiliazione e contenuti promozionali: Nei post di iu2frl.it posso includere collegamenti a rivenditori. Posso ricevere una piccola commissione dal rivenditore se effettui un acquisto dopo aver fatto clic su uno di questi link. I post non sono espressamente sponsorizzati da rivenditori, editori, promotori o produttori, se non diversamente specificato chiaramente e tutte le decisioni editoriali sono prese esclusivamente dagli autori dei singoli articoli.
Contenuti riguardanti regolamenti e/o normative: Eventuali riferimenti a normative non costituiscono valore legale, si tratta di libere interpretazioni ed estratti di circolari corredate da eventuali commenti, si invitano tutti gli utenti a verificare la veridicità di tali informazioni sugli organi ufficiali di riferimento, nessuna colpa o responsabilità può essere data agli autori degli articoli.
Licenza di utilizzo: Tutti i contenuti vengono condivisi con licenza CC BY-NC-SA 4.0: Questa licenza consente ad altri di remixare, adattare e sviluppare i contenuti in modo non commerciale, purché accreditino l'autore originale e concedano in licenza le loro nuove creazioni con gli stessi termini. Per maggiori informazioni visitare il sito Creative Commons.
Important Informations
General notes: The information contained in this article is of an informative nature and reflects the personal opinions of the author. All the guides/tutorial on the website are offered "as it is" for educational purposes only. The user who agrees to follow the steps assumes all responsibility in case of failure/malfunctioning or other problem as a result of the modification.
Affiliate links and promotional products: In some posts of iu2frl.it I can include links to resellers. I can get a small commission from the reseller if you make a purchase after clicking on one of these links. The posts are not expressly sponsored by resellers, publishers, promoters or producers, unless otherwise clearly specified and all editorial decisions are made solely by the authors of the individual articles.
Contents about rules and laws: Some articles may contain portions or whole laws or rules regarding specific areas, these kind of content are meant to be indicative only, no responsability can be given to the authors. Always refer to official sources when looking for rules or laws.
Contents licenses: All the contents are published as CC BY-NC-SA 4.0: This license lets others remix, adapt, and build upon your work non-commercially, as long as they credit you and license their new creations under the identical terms.. For more informations please visit Creative Commons website.
Ottimo lavoro.. 73 IZ4OSH
Realizzato da circa 5 mesi.. Perfetto nella sua funzionalità
Apportato qualche piccola modifica per adattarlo al mio rotore
mi fa molto piacere!